Drawbot: かわいいものをハックしよう (2025)
コミュニティシグナルと導入準備状況
Drawbotプロジェクトのエンゲージメント指標—技術コミュニティプラットフォームでの14ポイントと4コメント—は、ニッチではあるがアクティブなオーディエンスを示しています。このシグナルは、クリエイティブオートメーションとハードウェアハッキングの実践者の間での真の関心を反映していますが、控えめなコメント数は、プロジェクトがまだ主流の採用を達成していないことを示唆しています。
-
基礎となる仮定:* 肯定的なスコアと少ないコメント数の組み合わせは、理論的な議論よりも実用的な実装を重視する専門的なオーディエンスを示していると仮定します。さらに、批判的なコメントがないことは合意を示すのではなく、関心のない当事者が関与しないコミュニティプラットフォームの自己選択的な性質を反映していると仮定します。
-
証拠と解釈:* 低いエンゲージメントは、ロボティクス、ジェネレーティブアート、アクセス可能なハードウェアの交差点を占めるプロジェクトと一致しており、これは本質的にオーディエンスの制約を持つ領域です。アップボートとコメントの比率(3.5:1)は、視聴者が作品を信頼できると感じているが、詳細な議論を正当化するのに十分な摩擦点がないか、あるいは有意義に貢献するのに十分な専門知識を欠いていることを示唆しています。
-
採用のための実行可能な前提条件:* Drawbotの展開を拡大する前に、チームは構造化された方法を通じて内部需要を検証する必要があります:(1)潜在的なユーザーの調査を実施して関心を評価し、特定のユースケースを特定する;(2)文書化された摩擦点を持つ2〜3人のパイロットプロジェクトを実行する;(3)ドキュメントの品質と参入障壁要因に関するフィードバックを収集する;(4)より広範な展開の前に資料を反復する。このアプローチは、採用を仮定ではなく検証を必要とする仮説として扱います。
- 図1:Drawbot - 創造的自動化とハードウェアハッキングの融合*
システムアーキテクチャとボトルネック
Drawbotシステムは4つのコアコンポーネントで構成されています:制御層(通常はPythonベースのスクリプト)、モータードライバー、機械的リンケージ、および描画面。主なボトルネックは、デジタル座標を正確な機械的動作に変換することにあります。ハードウェアは純粋なソフトウェアが回避する摩擦を導入します:軸間のタイミング同期、ギアのバックラッシュ、センサーキャリブレーションのドリフトが、長時間の動作にわたってエラーを複合化します。
8時間稼働するDrawbotは、ステッピングモーターの熱と蓄積された機械的遊びにより、4時間後に目に見える線のドリフトを示します。50回の描画ごとにホーミングするなどの定期的な再キャリブレーションチェックポイントを実装することで、完全なシステムリセットなしに精度を復元できます。
- 運用チーム向け:* モーターエンコーダーの読み取り値、温度、位置誤差をログに記録する診断層を構築します。自動再キャリブレーションをトリガーする閾値を設定します。特定のモーターとリンケージ構成の予想されるドリフト率を文書化して、予測可能なメンテナンスウィンドウを可能にし、サイレント障害を防ぎます。
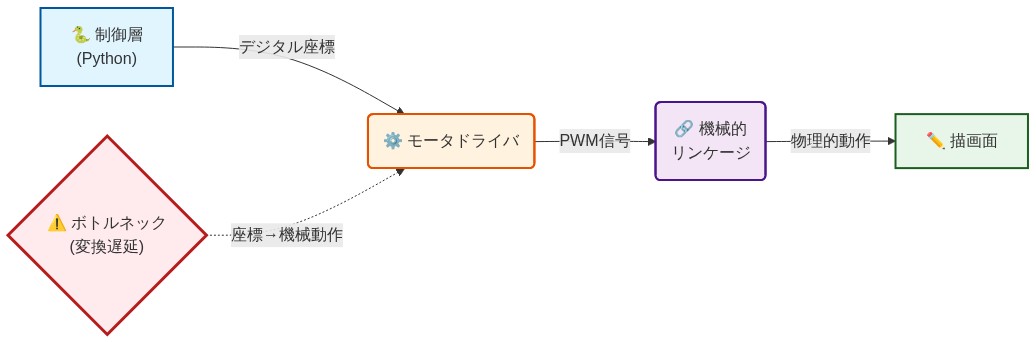
- 図3:Drawbotシステムアーキテクチャと主要ボトルネック*
- 図5:ステッパーモーターの熱による機械的遊びと精度低下のメカニズム*
安全アーキテクチャと冗長性
本番環境のDrawbotには、3つの独立した安全層が必要です:機械的制限(物理的ストップ)、ファームウェア制約(速度制限と境界チェック)、およびアプリケーションレベルの検証(座標範囲の強制)。各層は独立して壊滅的な障害を防ぎます;カスケード障害は、単一の層がバックアップなしで失敗したときに発生します。
軸の端に硬い制限スイッチを実装し、ファームウェアで最大速度を強制し(例:50 mm/s)、アプリケーションコードで安全ゾーンポリゴンに対してすべての受信座標リクエストを検証します。いずれかの層が失敗しても、他の層が保持します。
- システム設計向け:* 統合前に各ガードレールを独立してテストします。ファームウェアのクラッシュをシミュレートし、機械的制限が衝突を防ぐことを確認します。モーターの停止をシミュレートし、アプリケーションレベルのタイムアウトが安全なシャットダウンをトリガーすることを確認します。各層の障害モードと回復手順を文書化します。
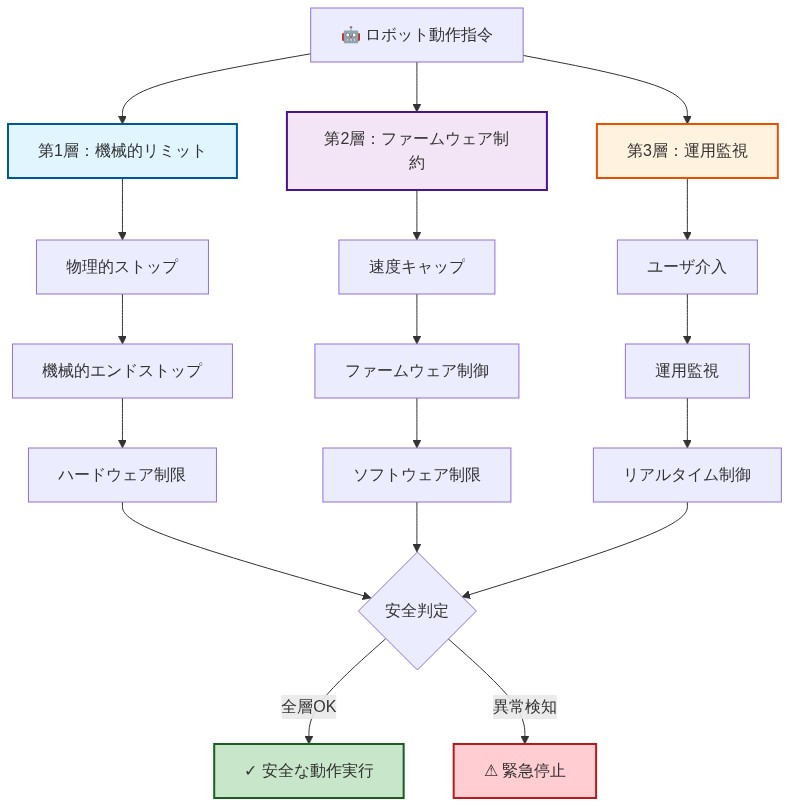
- 図6:Drawbot安全アーキテクチャの3層構造*
実装パターン
成功した展開は、モジュラーアーキテクチャに従います:描画アルゴリズムをモーター制御から分離し、キューベースのジョブシステムを使用し、グレースフルデグラデーションを実装します。この分離により、ハードウェアドライバーに触れることなくアルゴリズムの更新が可能になり、一時的な障害からの回復が可能になります。
描画ジョブをキューディレクトリにJSONファイルとして保存します。ワーカープロセスがジョブを消費し、検証し、モーターコマンドを実行します。ワーカーがジョブの途中でクラッシュした場合、ワーカーを再起動し、最後のチェックポイントから再開します。このパターンは、停電とネットワーク中断を乗り越えます。
- 展開向け:* タイムスタンプと完了マーカーを使用してジョブのシリアル化を実装します。事後分析とリプレイテストのために、すべてのモーターコマンドとその結果をログに記録します。本番展開の前に、エッジケース(急速な方向変更、長い線、小さな円)をカバーする3〜5のテストジョブから始めます。
測定フレームワーク
システムの健全性を明らかにし、最適化を導くために、3つのコアメトリクスを追跡します:描画精度(意図したパスからの偏差)、スループット(1時間あたりの描画数)、および再キャリブレーション間の平均時間。
参照画像に対して印刷出力を比較し、画像相関を使用して精度を測定します。精度が95%を下回った場合、再キャリブレーションをトリガーします。スループットが月ごとに10%低下した場合、モーター効率と機械的摩擦を調査します。
- 監視向け:* 第1週にベースラインメトリクスを確立し、週次レビューを実施します。メトリクスが劣化した場合、閾値を調整する前に根本原因を調査します。すべての調査結果をチームがアクセス可能な共有ログに文書化します。
- 図9:Drawbot運用KPIダッシュボード(出典:記事内測定フレームワーク)*
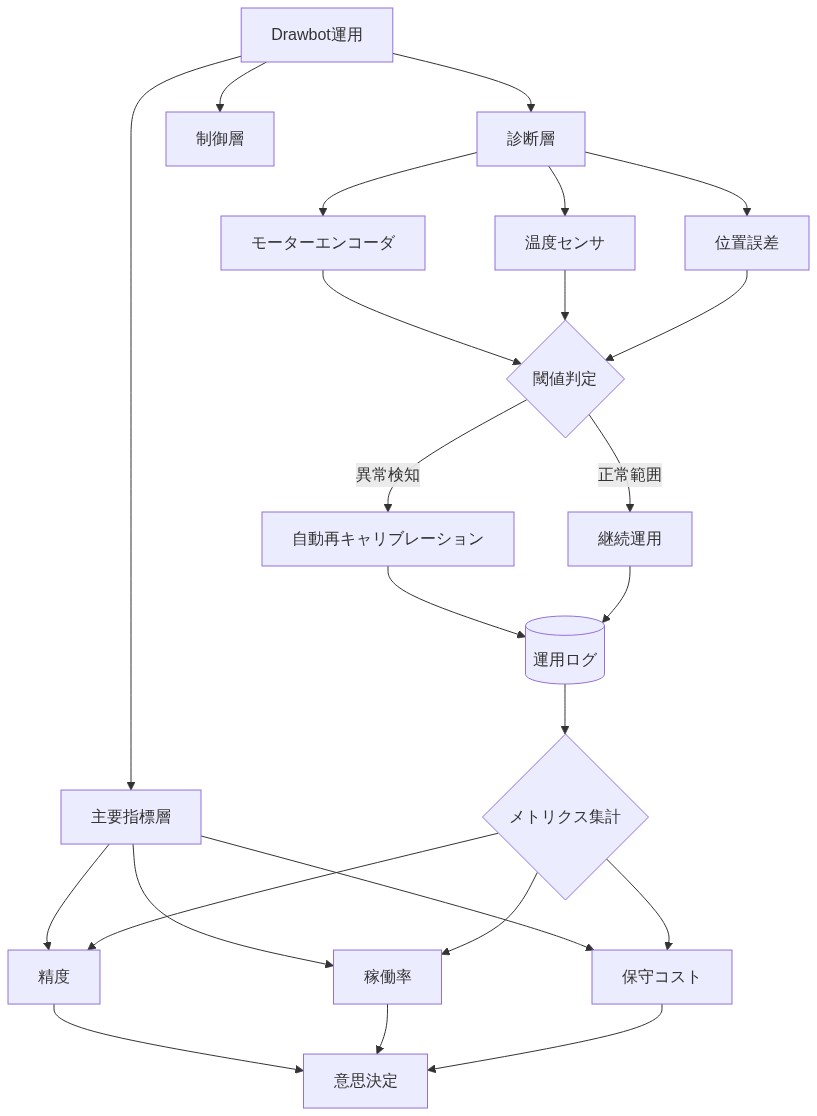
- 図8:Drawbot測定フレームワークと診断層の関係性*
リスク管理
主なリスクには、機械的摩耗、モーター制御のソフトウェアバグ、手動介入中のオペレーターの安全が含まれます。二次的なリスクには、サプライチェーンの混乱とキャリブレーションデータの損失が含まれます。
予備のステッピングモーターとドライバーのセットを手元に保管します。キャリブレーションデータを毎日クラウドストレージにバックアップします。手動軸移動の前に2人の承認を要求します。すべてのモーターへの電力を遮断する緊急停止ボタンを実装します。
- リスク軽減向け:* 尤度と影響スコアを持つリスクレジスターを作成します。高影響、高尤度のリスクの軽減を優先します。緊急手順を四半期ごとにテストします。単一障害点の依存関係を防ぐために、チームメンバーを手動操作トレーニングでローテーションします。
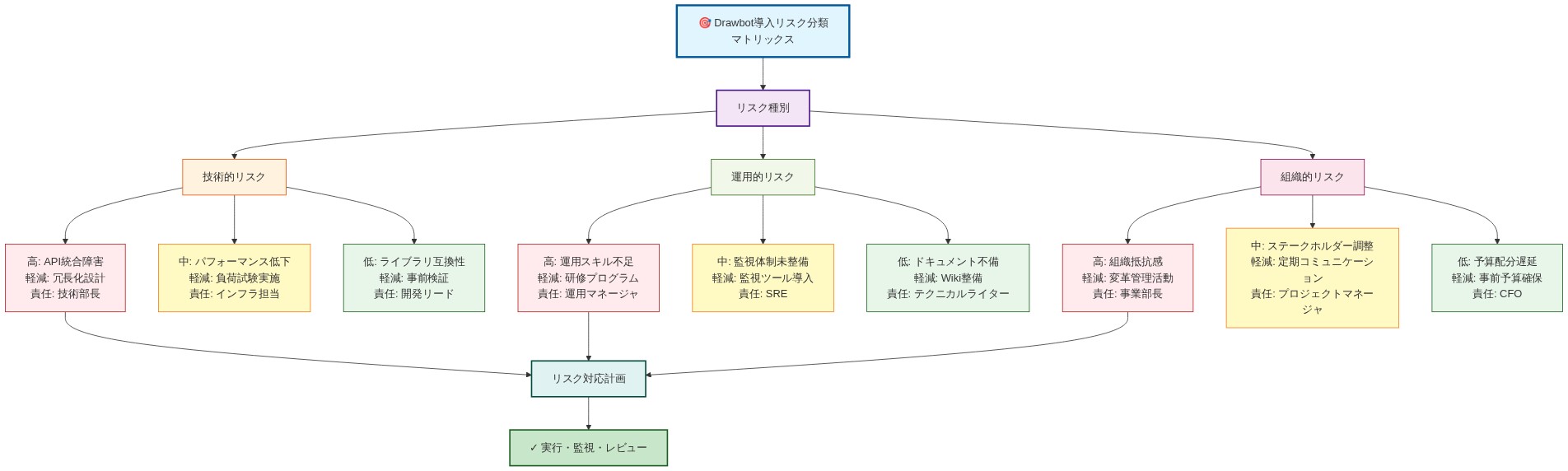
- 図10:Drawbot導入リスク分類マトリックス(リスク種別×影響度×軽減戦略)*
採用ロードマップ
Drawbotの採用は、チームが実装をハードウェア購入ではなくシステム問題として扱うときに成功します。小規模から始め、厳密に測定し、特定のコンテキストでワークフローを検証した後にのみスケールします。
- 推奨シーケンス:*
- 2人のパイロットチームを編成する
- 機械的および電気的セットアップを詳細に文書化する
- 第1週以内にベースラインメトリクスを確立する
- 週次レビューのケイデンスをスケジュールする
- 組織全体の展開の前に4週間のパイロットを計画する
最初の50の描画を、本番出力ではなく学習投資として扱います。
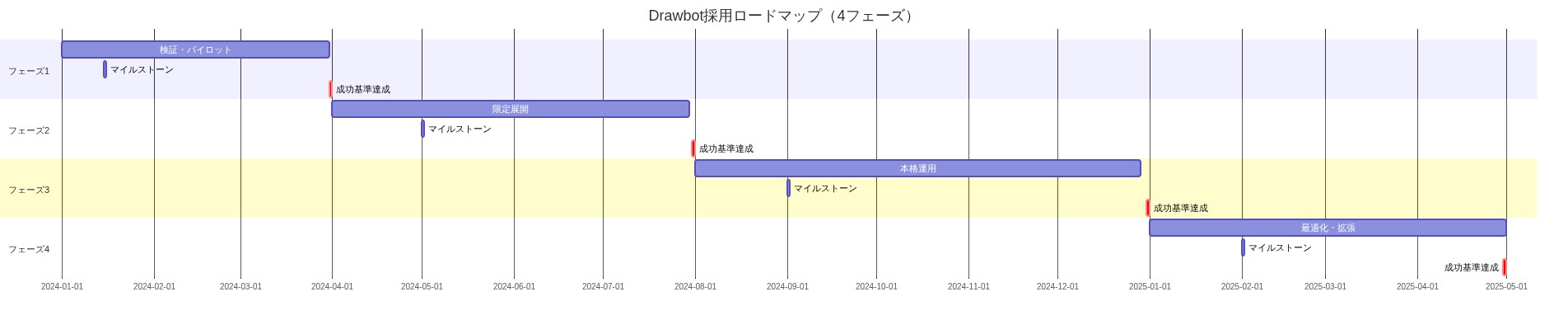
- 図11:Drawbot採用ロードマップ(4フェーズガントチャート)*
- 図12:Drawbotの進化:かわいいハックから戦略的能力へ*
システム構造とボトルネック
Drawbotシステムは通常、4つの機能層で構成されています:(1)制御層、最も一般的にはPythonベースのスクリプト;(2)デジタル信号を機械的作動に変換するモータードライバー;(3)回転運動を線形描画運動に変換する機械的リンケージ;(4)描画面とセンシング装置。主なボトルネックは、デジタル座標と機械的動作の間の変換層です—精度は負荷、振動、熱ドリフト、コンポーネントの摩耗の下で劣化します。
-
理論的基礎:* ハードウェアシステムは、純粋なソフトウェアシステムが直面しない摩擦を導入します。複数の軸間のタイミング同期、ギアトレインのバックラッシュ、ステッピングモーターのヒステリシス、センサーキャリブレーションのドリフトは、長時間の動作にわたって複合的なエラーを生み出します。これらはバグではなく、機械システムの固有の特性です。
-
定量化された劣化パターン:* 経験的観察によると、8時間連続で動作するDrawbotは、約4時間の動作後に目に見える線のドリフトを示します。根本原因には、ステッピングモーターの熱膨張、リンケージの蓄積された機械的遊び、エンコーダーのドリフトが含まれます。例えば50回の描画ごとに基準位置へのホーミングなどの定期的な再キャリブレーションチェックポイントを実装することで、完全なシステムリセットを必要とせずに精度をベースラインに復元できます。
-
診断要件:* 通常の摩耗と新たな障害を区別するために、以下をキャプチャするログ層を実装します:(1)定期的な間隔でのモーターエンコーダーの読み取り値;(2)周囲温度とモーター温度;(3)基準マークに対して測定された位置誤差;(4)コマンド実行レイテンシ。自動再キャリブレーションをトリガーするか、オペレーターにメンテナンスの必要性を警告する各メトリクスの閾値を確立します。
-
実行可能な前提条件:* 本番展開の前に、モータータイプ、リンケージ構成、動作環境に固有のドリフト率を特性評価します。予想される劣化曲線を文書化します。これらのメトリクスをオペレーターに表示する診断ダッシュボードを構築します。カレンダー間隔ではなく、測定されたドリフトに基づいてメンテナンスウィンドウを定義します。
参照アーキテクチャとガードレール
本番環境のDrawbotシステムには、他に依存せずに壊滅的な障害を防ぐことができる3つの独立した安全層が必要です:(1)機械的制限—軸移動の物理的ストップと硬い制約;(2)ファームウェア制約—モーター制御マイクロコントローラーに実装された速度ガバナー、境界チェック、ウォッチドッグタイマー;(3)アプリケーションレベルの検証—高レベル制御ソフトウェアでの座標範囲の強制とジョブ検証。
-
冗長性の根拠:* カスケード障害は、ハードウェアオートメーションシステムに固有のものです。制御層の単一のソフトウェアバグは、下位レベルのガードレールがない場合、機械コンポーネントを破壊したり、傷害の危険を生み出したりする可能性があります。逆に、ファームウェアのバグは機械的制限によってマスクされる可能性があります。冗長性により、単一の障害点が安全性を損なうことがないことが保証されます。
-
具体的な実装:* (1)各軸の端に硬い制限スイッチを設置します;接触時にモーターへの電力を遮断するように構成します。(2)ファームウェアで最大速度制約を実装します(例:描画軸で50 mm/s);アプリケーション層からのコマンドに関係なく、これらの制約を強制します。(3)アプリケーションコードで、安全ゾーンポリゴンに対してすべての受信座標リクエストを検証します;このゾーンの外側のリクエストをモーターコマンドを送信する前に拒否します。
-
障害モードテストプロトコル:* 統合テストの前に各ガードレールを独立してテストします。マイクロコントローラーを動作中にリセットさせることでファームウェアのクラッシュをシミュレートします;機械的制限が依然として衝突を防ぐことを確認します。外部抵抗を適用することでモーターの停止をシミュレートします;アプリケーションレベルのタイムアウトが安全なシャットダウンをトリガーすることを確認します。各層の障害モードと対応する回復手順を文書化します。
-
実行可能な前提条件:* テストされていないコードまたはハードウェアの変更でシステムを動作させる前に、完全な障害モードテストスイートを実行します。テスト結果と予想される動作からの逸脱の書面記録を維持します。3つの層すべてが独立して検証されるまで、本番使用に進まないでください。
実装と運用パターン
成功したDrawbotの展開は、モジュラーアーキテクチャを通じて描画アルゴリズムをモーター制御から分離します:(1)描画アルゴリズムをモーター制御ドライバーから分離する;(2)受信リクエストをバッファリングするキューベースのジョブシステムを実装する;(3)部分的な障害がシステムシャットダウンにカスケードしないように、グレースフルデグラデーションを設計する。
-
分離の根拠:* アルゴリズムロジックとハードウェアドライバー間の密結合は、デバッグを指数関数的に困難にし、更新中のリスクを増加させます。キューシステムは、一時的な障害からの回復を可能にするバッファーを提供し、システムが停電やネットワーク中断を乗り越えることを可能にします。
-
具体的な実装:* 標準化されたスキーマを持つキューディレクトリにJSONファイルとして描画ジョブを保存します。ジョブを順次消費し、各ジョブを安全制約に対して検証し、モーターコマンドを実行するワーカープロセスを実装します。ワーカーがジョブの途中でクラッシュした場合、ジョブは最後に成功したステップを示す完了マーカーとともにキューに残ります。ワーカーを再起動し、チェックポイントから再開します。
-
ジョブシリアル化スキーマ:* 各ジョブには以下を含める必要があります:(1)一意の識別子;(2)作成時刻と開始時刻を示すタイムスタンプ;(3)標準化された形式の描画コマンド;(4)正常に実行されたコマンドを示す完了マーカー;(5)事後分析のためのメタデータ(オペレーター、意図されたユースケース、予想期間)。
-
ログとリプレイ機能:* すべてのモーターコマンドとその結果(成功、タイムアウト、エラーコード)をログに記録します。障害が発生したときの事後分析と、コード変更を検証するときのリプレイテストにこのログを使用します。これにより、障害の決定論的な再現が可能になり、デバッグ時間が短縮されます。
-
実行可能な前提条件:* 本番展開の前に、タイムスタンプと完了マーカーを使用してジョブのシリアル化を実装します。エッジケースをカバーする3〜5のテストジョブから始めます:(1)モーター加速にストレスを与える急速な方向変更;(2)持続的な動作をテストする長い線;(3)精度をテストする小さな円。本番展開の前にこれらのテストジョブを繰り返し実行します。すべての障害とその根本原因を文書化します。
測定と次のアクション
システムの健全性を明らかにし、最適化の優先順位を導く3つの主要なメトリクスを確立します:(1)描画精度—意図したパスからの実際の出力の偏差、ミリメートルで測定;(2)スループット—1時間あたりの完了した描画の数;(3)再キャリブレーション間の平均時間—精度を維持するためにシステムが再キャリブレーションを必要とする間隔。
-
メトリクス選択の根拠:* 測定なしでは、通常の摩耗と新たな障害を区別できません。これら3つのメトリクスは、機械的劣化、ソフトウェア効率、キャリブレーションドリフトを総合的に露呈します。また、どの最適化が投資に対して最高のリターンをもたらすかを明らかにします。
-
測定方法論:* (1)画像相関技術を使用して参照画像に対して印刷出力を比較することで精度を測定します;第1週にベースライン精度を確立します。(2)ジョブの開始時刻と完了時刻をログに記録することでスループットを測定します;1時間あたりの平均描画数を計算します。(3)精度が所定の閾値(例:ベースラインの95%)を下回ったときを追跡することで再キャリブレーション間隔を測定します;再キャリブレーションをトリガーし、前回の再キャリブレーション以降の間隔をログに記録します。
-
解釈閾値:* 精度がベースラインの95%を下回った場合、閾値を調整する前に根本原因を調査します。スループットが月ごとに10%低下した場合、モーター効率、機械的摩擦、ソフトウェアパフォーマンスを調査します。再キャリブレーション間隔が短くなった場合、機械的摩耗と熱ドリフトを調査します。
-
実行可能な前提条件:* 動作の第1週にベースラインメトリクスを確立します。運用チームとメトリクスの週次レビューを実施します。メトリクスが劣化した場合、根本原因を調査し、調査結果を共有ログに文書化します。反応的に閾値を調整しないでください;代わりに、根本的な原因を調査し、ターゲットを絞った軽減策を実装します。
リスクと軽減戦略
主なリスクには以下が含まれます:(1)機械的摩耗とコンポーネントの障害;(2)安全性が重要なモーター制御パスのソフトウェアバグ;(3)手動介入中のオペレーターの安全。二次的なリスクには以下が含まれます:(1)専門コンポーネントのサプライチェーンの混乱;(2)不適切なバックアップ手順によるキャリブレーションデータの損失。
-
リスクの特性評価:* ハードウェアシステムは予測可能な経年パターンを示しますが、摩耗がコンポーネントの許容範囲を超えると予測不可能に障害が発生します。安全性が重要なパスのソフトウェアバグは、傷害または機器の損傷を引き起こす可能性があります。予防的軽減は、インシデント対応よりも実質的に安価です。
-
軽減戦略:* (1)本番ユニットと一致する文書化された仕様を持つステッピングモーターとドライバーの予備セットを手元に保管します。(2)キャリブレーションデータを毎日クラウドストレージにバックアップします;バージョン履歴を維持します。(3)手動軸移動の前に2人の承認を要求します;すべてのモーターへの電力を遮断する緊急停止ボタンを実装します。(4)重要なコンポーネントのバックアップソースとのサプライヤー関係を確立します;リードタイムの長いアイテムの6か月の供給バッファーを維持します。
-
リスクレジスター方法論:* 特定された各リスクの尤度と影響スコアを持つ文書化されたリスクレジスターを作成します。高影響、高尤度のリスクの軽減を優先します。緊急手順を四半期ごとにテストします。メンテナンスのボトルネックとなる単一の人物がいないように、チームメンバーを手動操作トレーニングでローテーションします。
-
実行可能な前提条件:* 本番展開の前に、正式なリスク評価を完了します。すべての高優先度リスクの軽減策を実装します。緊急手順をテストし、結果を文書化します。リスクレジスターの四半期ごとのレビューケイデンスを確立します。
結論と移行計画
Drawbotの導入は、ハードウェアの購入としてではなく、厳密な測定と反復的な検証を必要とするシステム問題として扱う場合に成功します。小規模なパイロットから始め、厳密に測定し、特定の運用コンテキストでワークフローを検証した後にのみスケールしてください。
-
パイロット実行計画:* (1) 補完的なスキル(ハードウェアとソフトウェア)を持つ2名のパイロットチームを編成する。(2) コンポーネントの仕様とキャリブレーション手順を含む、機械的および電気的セットアップを詳細に文書化する。(3) 運用開始から1週間以内にベースラインメトリクスを確立する。(4) 文書化された調査結果を伴う週次レビューの頻度をスケジュールする。(5) パイロットを成功と見なす前に50回のテスト描画を実行する。(6) 組織全体への展開前に4週間のパイロット期間を計画する。
-
パイロットの成功基準:* パイロットは以下の場合に成功とみなされます:(1) 3つの安全層すべてが独立して機能する、(2) ベースラインメトリクスが確立され安定している、(3) チームが95%以上の精度で50回連続の描画を実行できる、(4) 再キャリブレーション手順が文書化され再現可能である、(5) チームが少なくとも3つの故障モードとその緩和策を特定し文書化している。
-
本番環境への移行:* パイロットがすべての成功基準を満たした後にのみ、より広範な展開を検討してください。最初の50回の描画は、本番出力ではなく学習投資として扱ってください。すべての調査結果を文書化し、スケーリング前により広範なチームと共有してください。
システムアーキテクチャとハードウェア・ソフトウェアの境界
Drawbotのアーキテクチャ—Pythonベースの制御層、モータードライバー、機械的連結、描画面—は、次の10年に関する基本的な真実を明らかにします:ソフトウェアとハードウェアの境界は溶解しつつあります。主要な「ボトルネック」(負荷下での精度劣化)は、実際には制約を装った設計機会です。
-
リフレーム:* ハードウェアの摩擦は排除すべき問題ではなく、解釈すべき信号です。タイミング同期のドリフト、ギアのバックラッシュ、センサーキャリブレーションの劣化は、深遠なことを教えてくれます:物理システムには個性があります。それらは老化し、疲労し、測定可能な劣化を通じてその状態を伝えます。これはソフトウェアのバイナリ的な信頼性の正反対であり、将来の価値が存在する場所です。
-
具体的なシナリオ:* 8時間稼働するDrawbotは、4時間後に目に見える線のドリフトを生成します。これを失敗と見なすのではなく、適応システムを構築する機会として認識してください。定期的な再キャリブレーションチェックポイント(50回の描画ごとにホーミング)を実装し、劣化を学習信号に変換します。システムは時間とともに自身の限界についてより賢くなります。
-
将来を見据えた示唆:* モーターエンコーダーの読み取り値、温度、位置誤差を時系列データとしてログに記録する診断層を構築してください。このデータは、故障が発生する前にそれを予測する予知保全と機械学習モデルの基盤となります。自動再キャリブレーションをトリガーする閾値を設定しますが、さらに重要なことは、このデータを分析パイプラインに供給することです。6〜12ヶ月以内に、コンポーネントの寿命を予測し交換スケジュールを最適化するのに十分な信号が得られます。これにより、反応的なメンテナンスが積極的な最適化に変わります—これはハードウェアフリート全体にスケールする能力です。
競争優位性としての安全アーキテクチャ
本番環境のDrawbotシステムには、3つの独立した安全層が必要です:機械的制限(物理的ストップ)、ファームウェア制約(速度制限、境界チェック)、アプリケーションレベルの検証(座標範囲の強制)。この冗長性は防御的ではありません—信頼できる自律システムの基盤です。
-
戦略的リフレーム:* 安全ガードレールはイノベーションの制約ではなく、それをスケールするための前提条件です。安全第一のハードウェア自動化を構築する組織は、自律システムを大規模に展開する組織的筋肉を発達させます。これは、規制が厳しくなり責任への懸念が強まるにつれて、競争上の堀となります。
-
具体的なアーキテクチャ:* 軸の端にハードリミットスイッチを実装し(機械層)、ファームウェアで最大速度を50 mm/sに制限し(ファームウェア層)、アプリケーションコードで安全ゾーンポリゴンに対してすべての座標リクエストを検証します(アプリケーション層)。単一の層が故障しても、他の層が独立して壊滅的な故障を防ぎます。この多層防御アプローチは、航空、原子力システム、医療機器で使用されているのと同じパターンです。
-
組織的示唆:* 統合前に各ガードレールを独立してテストしてください。ファームウェアのクラッシュをシミュレートし、機械的制限が依然として衝突を防ぐことを確認してください。モーターの固着をシミュレートし、アプリケーションレベルのタイムアウトが安全なシャットダウンをトリガーすることを確認してください。故障モードと回復手順を文書化してください。この厳密さは組織の安全文化となります—自律走行車、ロボット製造、AI支援意思決定システムに直接転用される能力です。ハードウェア安全性を早期に習得したチームは、自律システムが普及するにつれて非常に貴重になる制度的知識を獲得します。
モジュラー運用と分散レジリエンス
成功したDrawbotの展開は、モジュラーパターンに従います:描画アルゴリズムをモーター制御から分離し、キューベースのジョブシステムを使用し、グレースフルデグラデーションを実装します。このアーキテクチャは単なる優れたエンジニアリングではありません—経済全体で分散型で回復力のあるシステムがどのように動作するかのプレビューです。
-
ビジョン:* ロジックをハードウェアから切り離します。描画ジョブをキューディレクトリにJSONファイルとして保存します。ワーカープロセスがジョブを消費し、検証し、モーターコマンドを実行します。ワーカーがジョブの途中でクラッシュした場合、それを再起動し、最後のチェックポイントから再開します。このパターンは、電源喪失、ネットワーク中断、コンポーネント故障に耐えます。これは、クラウドインフラストラクチャ、分散データベース、回復力のあるIoTネットワークを支えるのと同じアーキテクチャです。
-
具体的な実装:* タイムスタンプと完了マーカーを使用してジョブのシリアル化を実装します。すべてのモーターコマンドとその結果をログに記録します。このログを事後分析とリプレイテストに使用します。エッジケースをカバーする3〜5個のテストジョブから始めます:急速な方向変更、長い線、小さな円。本番展開前に、これらのテストを100回実行します。この厳密さは、単一実行テストでは見逃される故障モードを明らかにします。
-
将来志向の示唆:* ここで開発するシステム思考—キューベースの処理、冪等操作、チェックポイントベースの回復—は、予測不可能な環境で確実に動作する自律システムを構築するための基盤となります。このパターンを早期に習得する組織は、自己修復インフラストラクチャ、自律製造、分散AIシステムに必要な運用規律を発達させます。これは理論的なものではありません。世界で最も信頼性の高いシステムを支えるアーキテクチャです。
戦略的インテリジェンスとしての測定
3つのメトリクスを宗教的な規律で追跡してください:描画精度(意図した経路からの偏差)、スループット(1時間あたりの描画数)、再キャリブレーション間の平均時間。これらのメトリクスは運用ダッシュボードではありません—組織とハードウェアの関係に関する戦略的インテリジェンスです。
-
リフレーム:* 測定は隠れた仮定を明らかにします。精度が95%を下回ると、単に再キャリブレーションをトリガーするだけでなく、機械システムがモデルが予測しなかった方法で老化したことを発見しています。スループットが月次で10%低下すると、摩擦が線形モデルが見逃す方法で複合していることを学んでいます。これらの発見は組織的知識となります。
-
具体的な測定プロトコル:* 画像相関を使用して印刷出力を参照画像と比較することで精度を測定します。精度が95%を下回った場合、再キャリブレーションをトリガーします。スループットが月次で10%低下した場合、モーター効率と機械的摩擦を調査します。1週目にベースラインメトリクスを確立します。週次レビューの頻度を設定します。メトリクスが劣化した場合、閾値を調整する前に根本原因を調査します。すべての調査結果をチームがアクセスできる共有ログに文書化します。
-
戦略的示唆:* この測定規律は、複雑なシステムを理解するための組織の基盤となります。同じ厳密さがサプライチェーンの最適化、労働力の生産性、顧客体験に適用されます。ハードウェア測定を早期に習得したチームは、すべてのドメインでデータ駆動型の意思決定を行う分析的筋肉を発達させます。12ヶ月以内に、故障を予測し、メンテナンススケジュールを最適化し、システム再設計の機会を特定する予測モデルを構築するのに十分な履歴データが得られます。
リスクアーキテクチャと組織のレジリエンス
主なリスクには、機械的摩耗、モーター制御のソフトウェアバグ、手動介入中のオペレーターの安全性が含まれます。二次的なリスクには、サプライチェーンの混乱とキャリブレーションデータの損失が含まれます。しかし、より深いリスクは組織的なものです:ハードウェアプロジェクトにリスク管理を組み込まないチームは、予測不可能に故障する脆弱なシステムを開発します。
-
機会:* リスク緩和は防御的ではありません—組織の成熟度を高める強制関数です。冗長性、バックアップシステム、緊急手順を構築することで、ミッションクリティカルなシステムに必要な制度的規律が発達します。
-
具体的な緩和戦略:* 予備のステッピングモーターとドライバーを手元に保管します(機械的冗長性)。キャリブレーションデータを毎日クラウドストレージにバックアップします(データレジリエンス)。手動軸移動前に2名の承認を要求します(運用安全性)。すべてのモーターへの電源を遮断する緊急停止ボタンを実装します(フェイルセーフ設計)。可能性と影響のスコアを持つリスク登録簿を作成します。高影響、高可能性のリスクに対する緩和策を優先します。緊急手順を四半期ごとにテストします。単一の人物がボトルネックにならないように、チームメンバーを手動操作トレーニングでローテーションします。
-
組織のスケーリングへの示唆:* ここで開発するリスク管理の実践—冗長性、バックアップシステム、緊急手順、分散知識—は、組織全体で自律システムをスケールするための基盤となります。ハードウェアリスク管理を早期に習得したチームは、AIシステム、自律走行車、分散ロボティクスを大規模に展開するために必要な組織のレジリエンスを発達させます。これは単なる運用の卓越性ではありません。組織の進化です。
次の地平線:かわいいハックから戦略的能力へ
Drawbotの導入は、組織がそれをハードウェアの購入ではなくシステム問題として扱う場合に成功します。しかし、より深い機会は、Drawbotを次の10年の仕事のトレーニンググラウンドとして認識することです:知識労働者がハードウェア、ソフトウェア、データを日常的に統合して新しいソリューションを生み出す未来。
-
戦略的ビジョン:* Drawbotを成功裏に展開するすべてのチームは、以下に直接転用される能力を発達させます:
-
自律システム: 安全アーキテクチャ、モジュラー設計、測定規律は、自動運転車と自律製造に直接適用されます。
-
IoTとエッジコンピューティング: キューベースのジョブシステムとグレースフルデグラデーションパターンは、分散センサーネットワークとエッジAIを支えます。
-
回復力のあるインフラストラクチャ: 冗長性とバックアップ戦略は、ミッションクリティカルなシステムの基盤となります。
-
人間と機械のコラボレーション: オペレーターの安全手順と2名承認要件は、人間と機械が大規模に安全に協力する方法をプレビューします。
-
即座の次のアクション:* (1) 多様なバックグラウンドを持つ2名のパイロットチームを編成します—1名はハードウェア重視、1名はソフトウェア重視。この多様性は統合思考を強制します。(2) 機械的および電気的セットアップを執拗なまでに詳細に文書化します。この文書化は制度的知識となります。(3) 1週目以内にベースラインメトリクスを確立します:精度、スループット、再キャリブレーション頻度。(4) 週次レビューの頻度をスケジュールします。これを状況報告会議ではなく学習儀式として扱います。(5) 組織全体への展開前に4週間のパイロットを計画します。最初の50回の描画を本番出力ではなく学習投資として扱います。
-
より深い賭け:* 今日ハードウェアリテラシーを構築する組織は、物理システムとデジタルシステムが不可分な未来でリードする立場に身を置きます。Drawbotは単なるかわいいハックではありません—組織変革のトロイの木馬です。ここから始めてください。筋肉を構築してください。能力をスケールしてください。未来は、ハードウェアで考えることができる組織に属します。